🎯 MoveIt 教程¶
MoveIt 运动规划完整教程,包含仿真模式、真机模式和进阶操作。
📋 前提条件¶
| 项目 | 要求 |
|---|---|
| 🔧 ROS2 | Humble 已安装 |
| 📁 工作空间 | openarmx_ws 已编译 |
| 🤖 硬件 | 可选(仿真模式不需要) |
仿真模式¶
仿真模式无需连接真实硬件,适合用于学习、调试和算法验证。
启动仿真¶
cd ~/openarmx_ws
source install/setup.bash
ros2 launch openarm_bimanual_moveit_config demo_sim.launch.py
⏱️ 等待 3-5 秒,RViz 窗口自动打开。
启动成功界面:
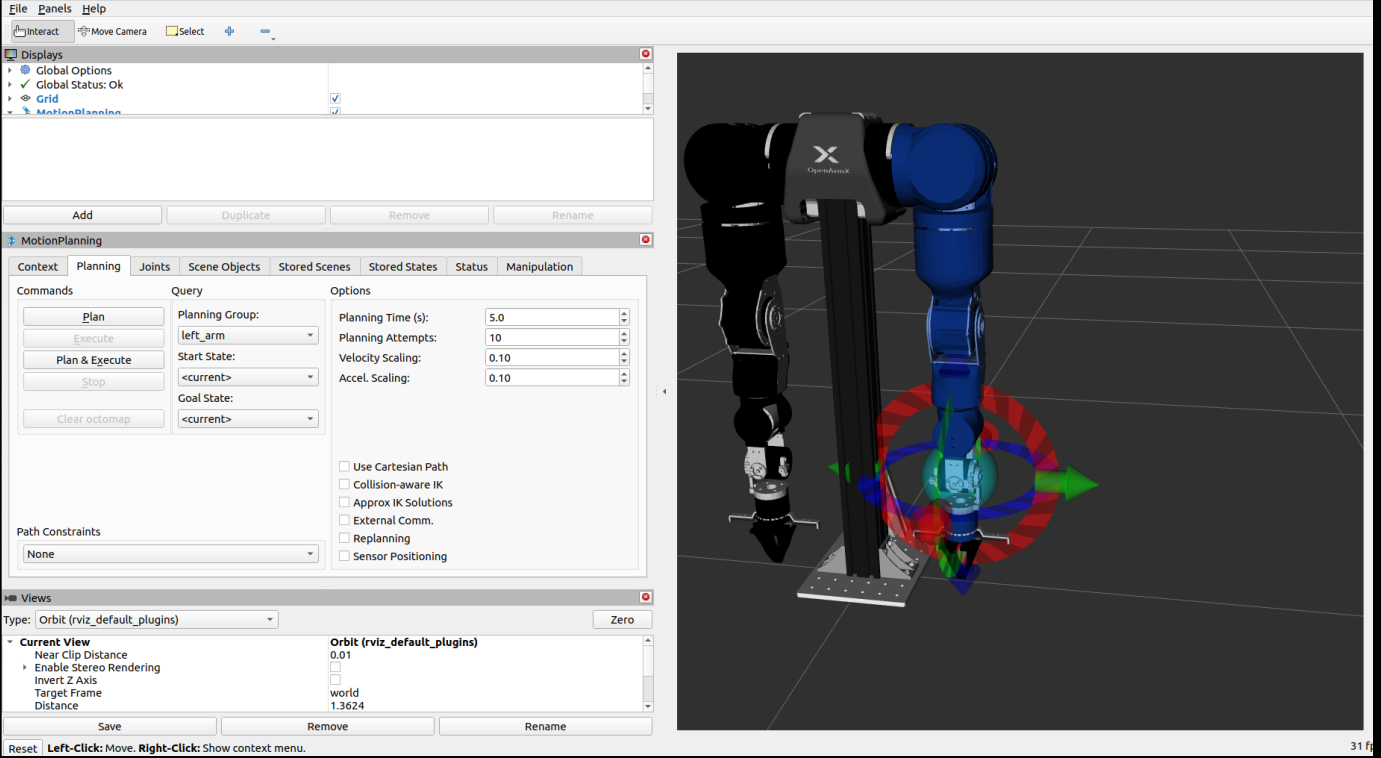
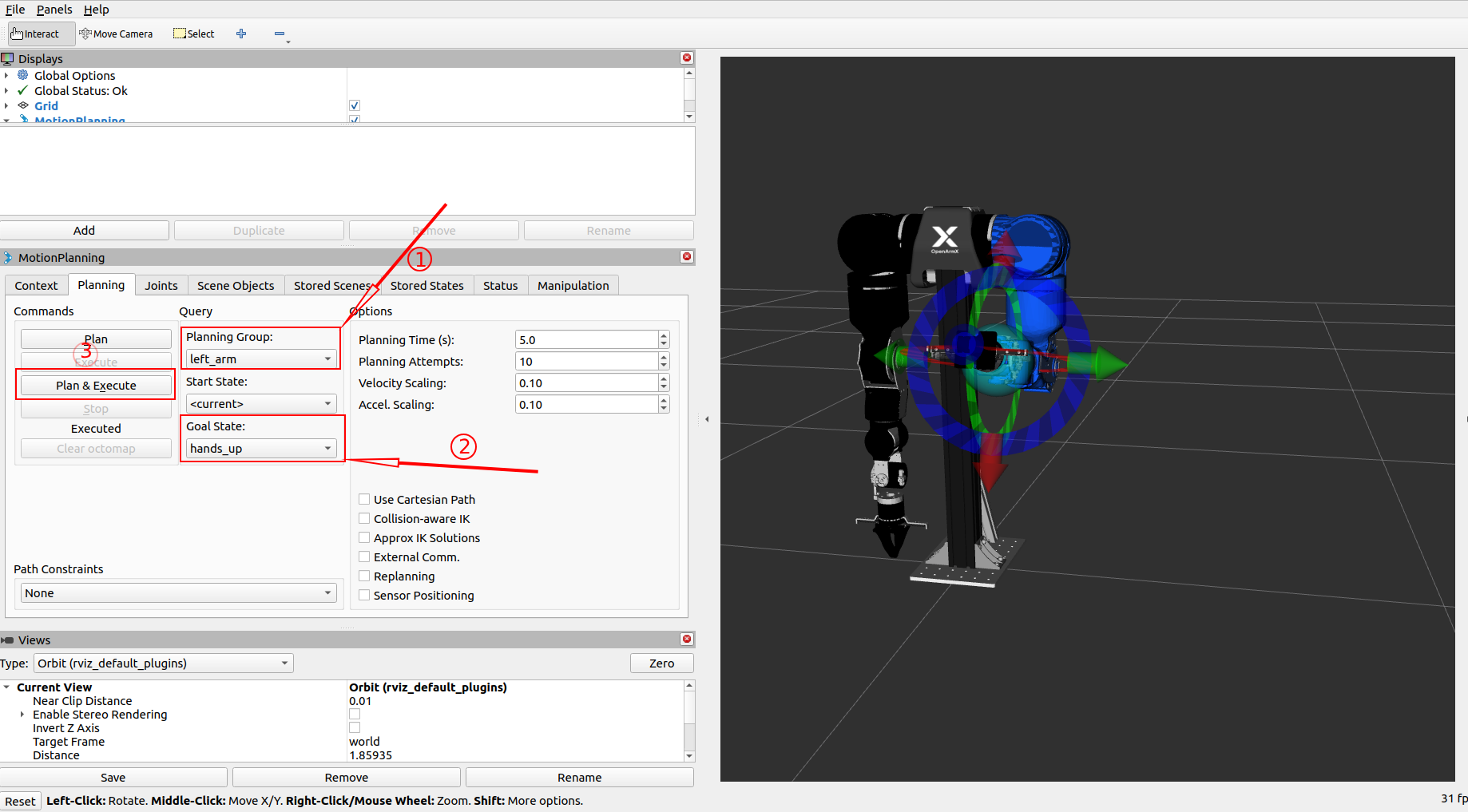
仿真操作示例¶
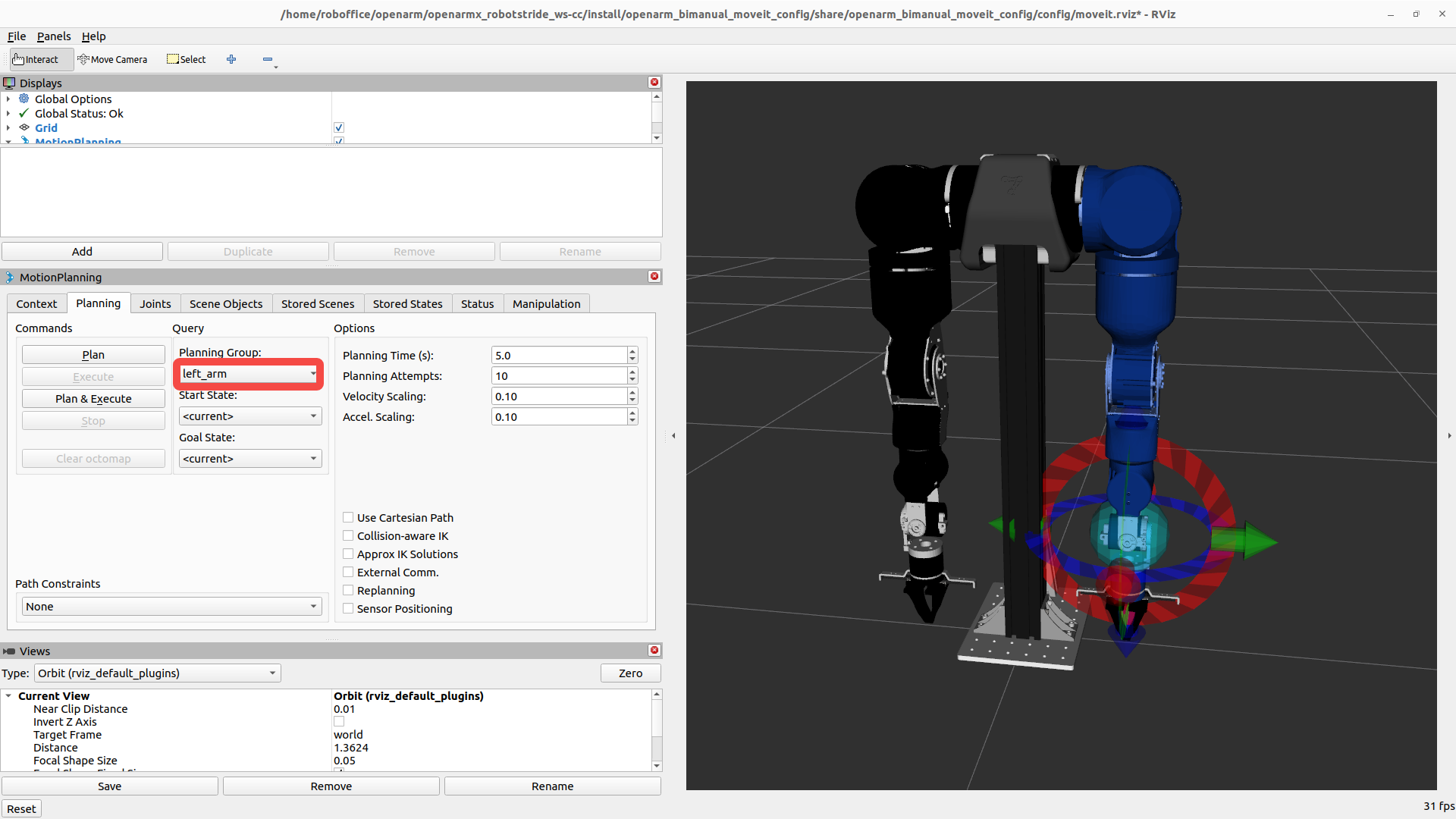
Hands_up: 在 Planning_Group 中选择 left_arm,然后在 Goal State 中选择 hands_up,点击 Execute。
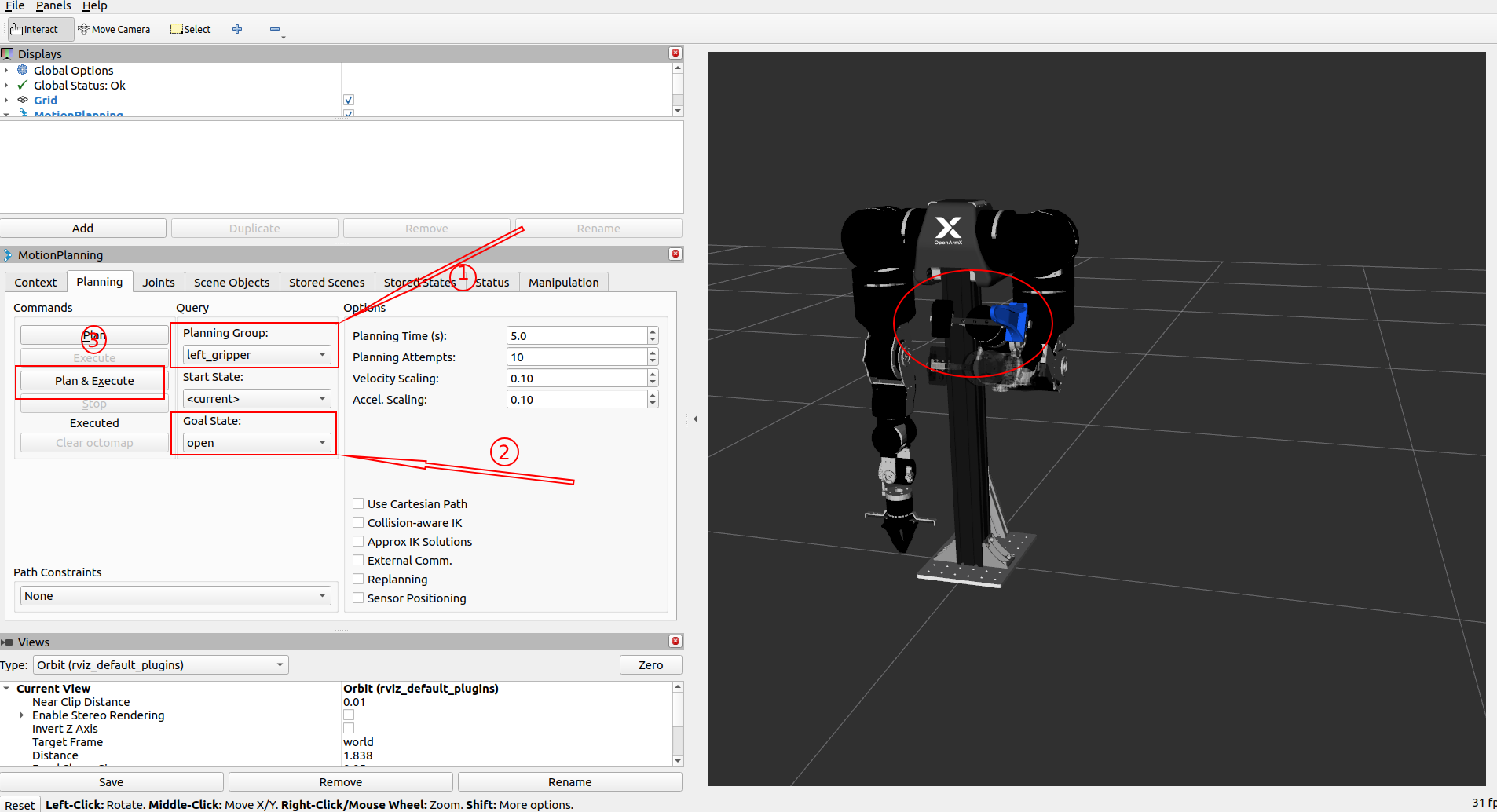
Open_gripper: 在 Planning_Group 中选择 left_gripper,然后在 Goal State 中选择 open,点击 Execute。关闭 gripper 可在 Goal State 中选择 closed,再点击 Execute。
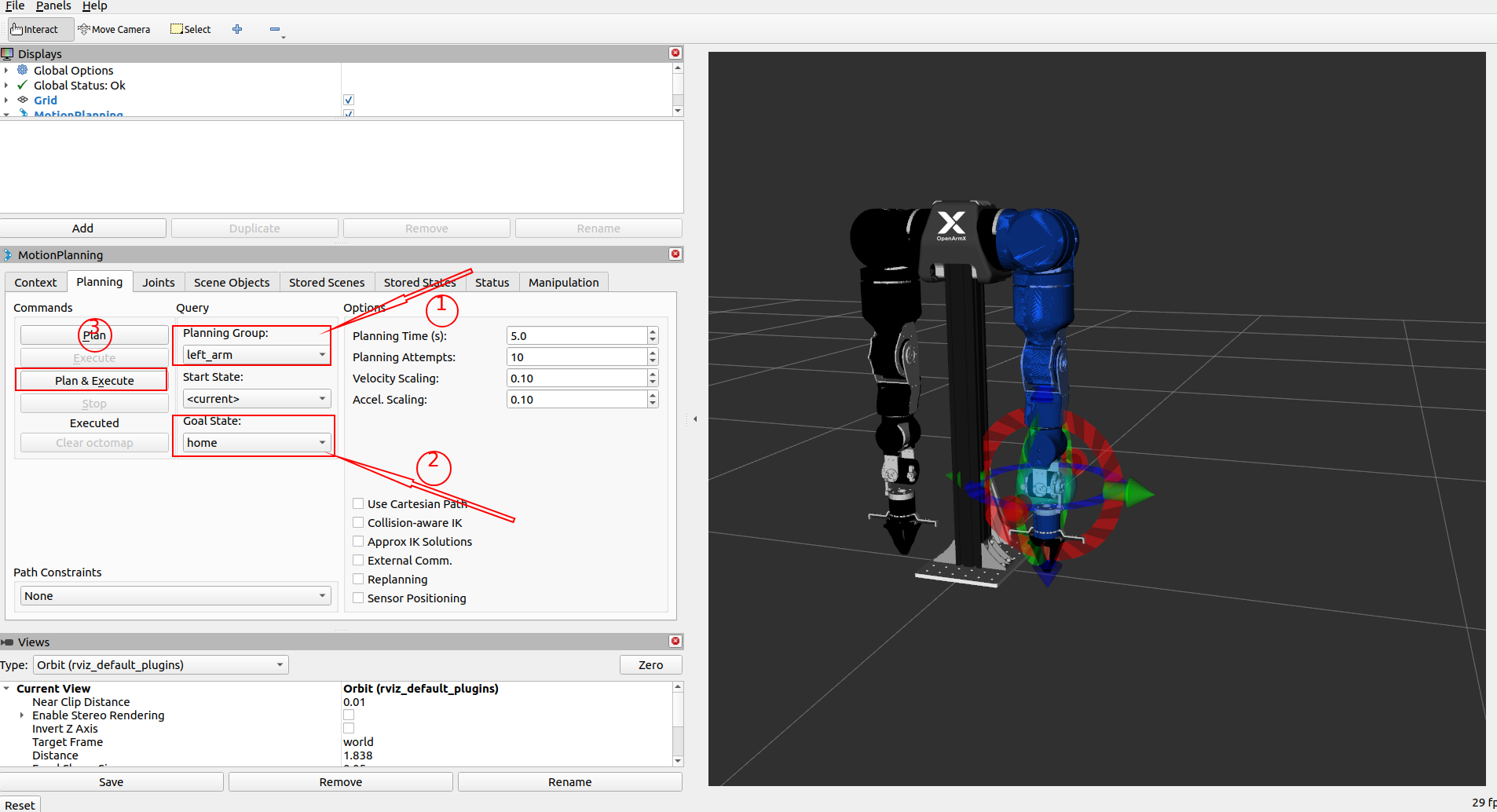
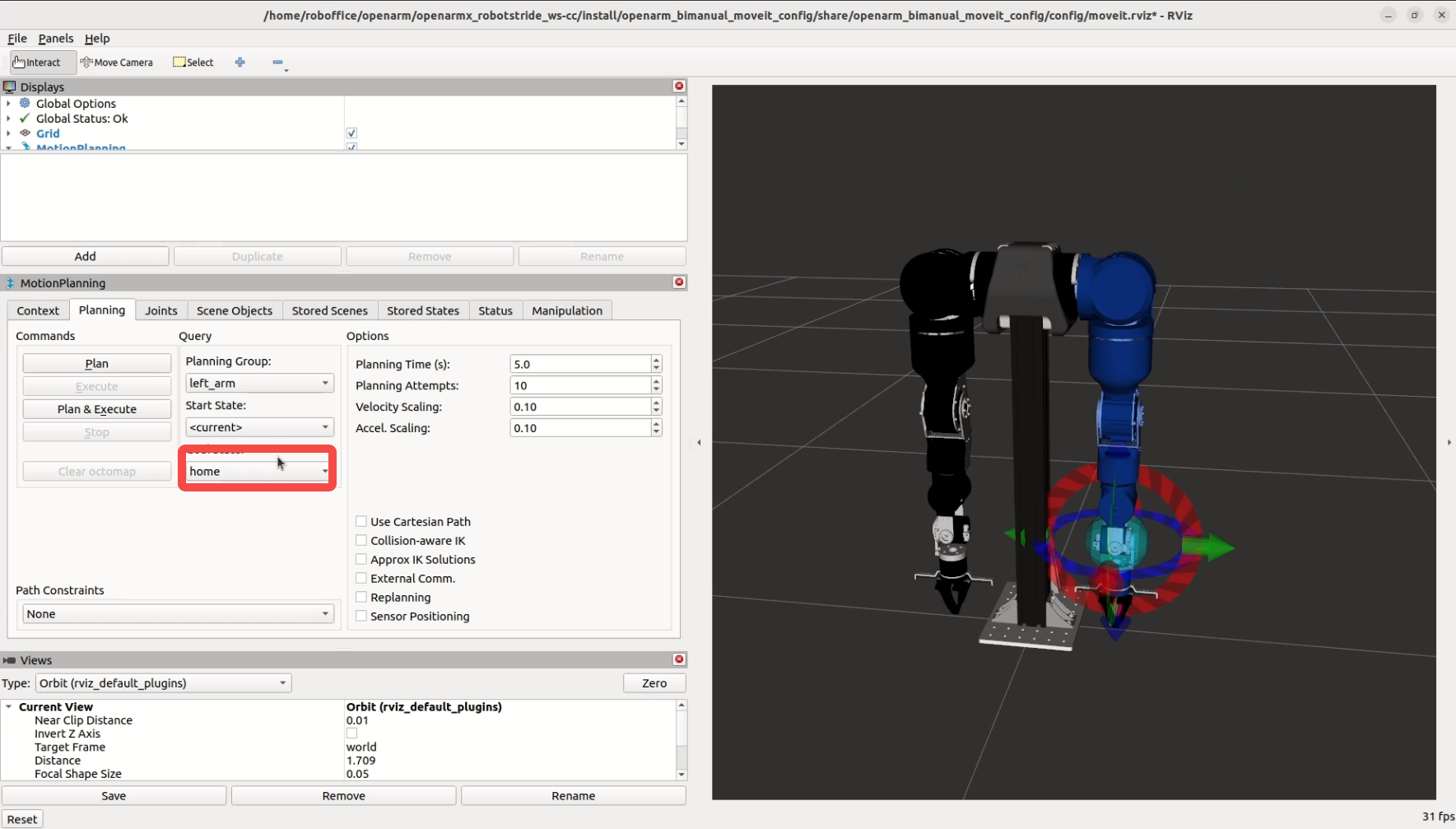
Home: 在 Planning_Group 中选择 left_arm,然后在 Goal State 中选择 home,点击 Execute。
真机模式¶
🚨 运动前确认:
- 急停按钮就位,随时可按下
- 工作区域无人员和障碍物
- 已完成电机测试
启动真机¶
cd ~/openarmx_ws
source install/setup.bash
ros2 launch openarm_bimanual_moveit_config demo.launch.py control_mode:=mit
⏱️ 等待 3-5 秒,RViz 窗口自动打开。
启动成功界面:
{ width="100%" }
第一次运动¶
步骤 1:选择控制对象
在左侧 Planning 面板的 Planning Group 下拉菜单中选择 right_arm 或 left_arm。
步骤 2:设置目标位置
- 💡 推荐新手:点击 "Select Random Valid Goal" 按钮
- 🎨 进阶用户:拖动 3D 视图中的彩色交互标记
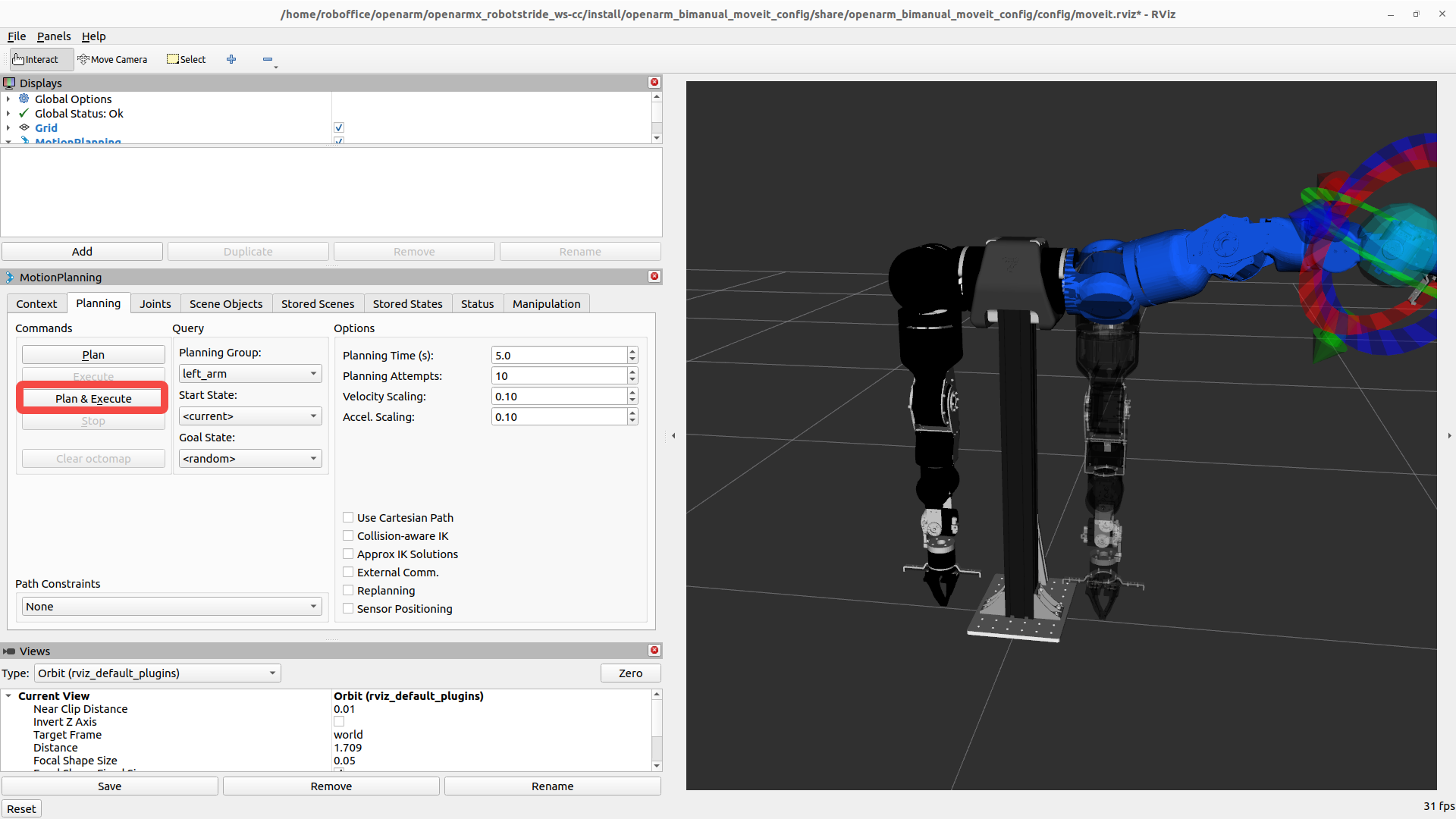
步骤 3:规划并执行
- 点击 "Plan" 按钮(等待规划完成)
- 检查橙色轨迹是否合理
- 点击 "Execute" 按钮开始运动
真机操作视频¶
视频制作中,敬请期待!
常用操作¶
| 操作 | 步骤 |
|---|---|
| 调整速度 | Planning 面板 → Velocity Scaling Factor(建议 0.1-0.3) |
| 回零位 | Goal State → home → Update → Plan & Execute |
| 手动控制 | 拖动 3D 视图中的彩色交互标记 |