⚠️ 安全指南¶
警告:请在操作 OpenArmX 前仔细阅读本指南,并安全使用,风险自负。
在使用、安装或调试 OpenArmX 之前,请确保:
- 已完整阅读本简要版及完整《安全声明》相关章节;
- 已充分理解可能存在的机械、电气和软件风险;
- 已准备好有效的急停装置和必要的个人防护措施。
🛡️ 安全使用要求¶
1. 📍 安装在安全地点¶
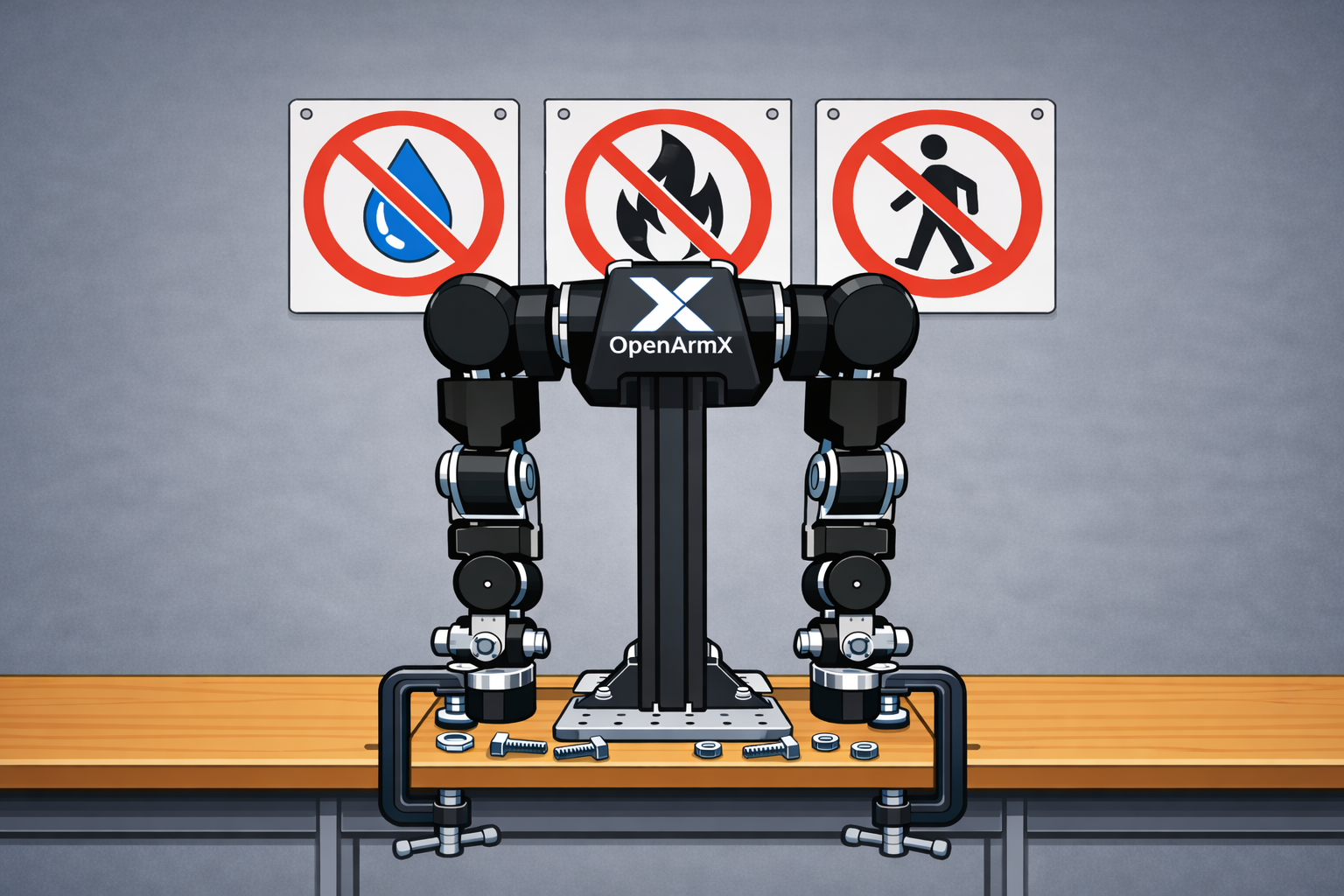
安装 OpenArmX 时,用螺丝或夹具牢固固定在平坦且稳定的表面上。
安装要点:
- ✅ 选择平坦稳固的表面
- ✅ 使用螺丝或夹具牢固固定
- ❌ 远离易碎物品和易燃材料
- ❌ 远离潮湿源和水源
- ❌ 避开人员频繁通行的区域
2. 📏 保持安全距离¶
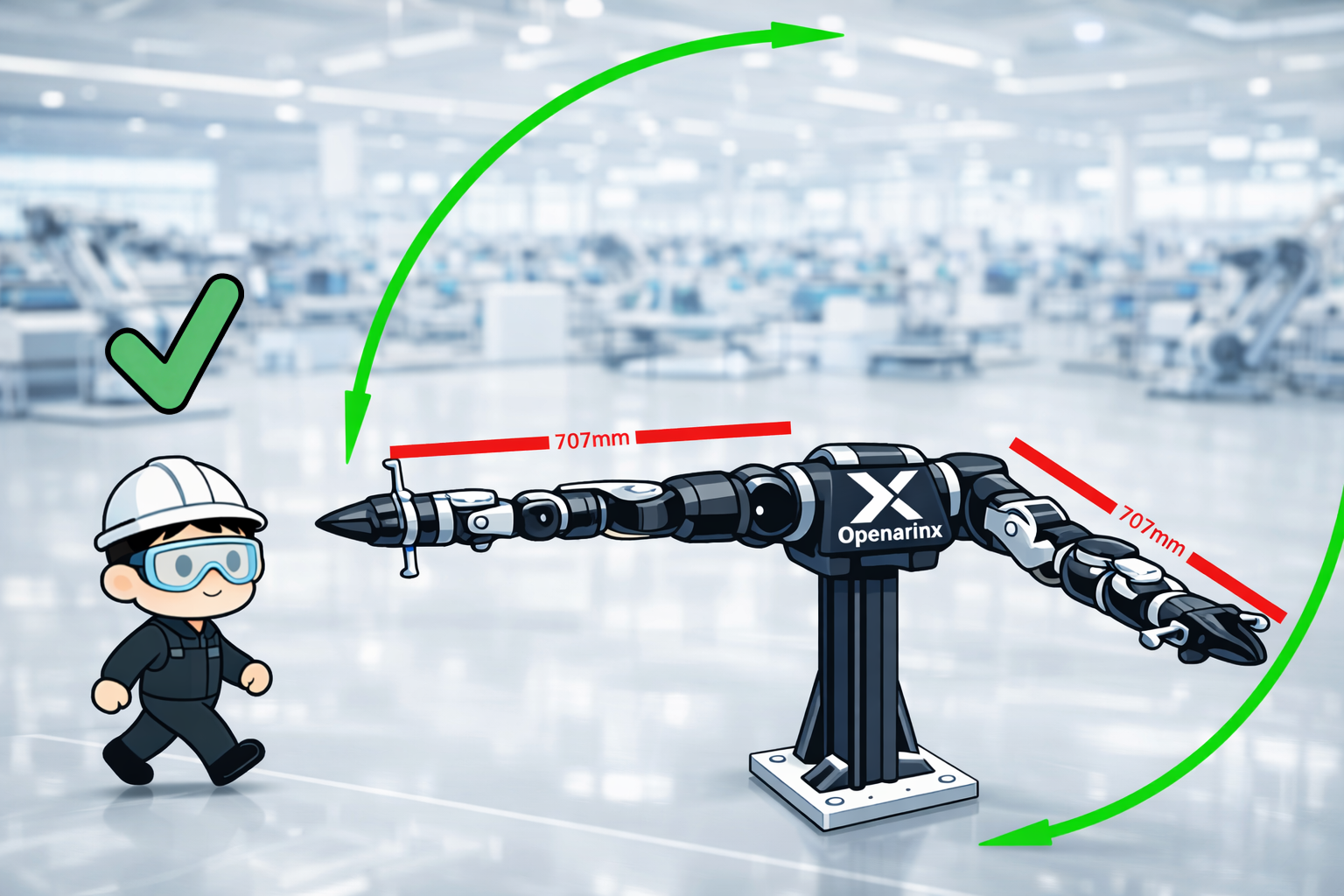
操作 OpenArmX 时,务必确保身体的任何部位或任何物体不进入其活动范围。
距离要求:
- 🚫 操作时保持在机器人运动范围之外
- 🔌 调整前务必确认电源已关闭
- 👥 确保附近人员不会意外开启电源
- 🚧 必要时使用障碍物或标记限制进入
警告:在处理大型物体或安装原有末端执行器时,活动范围会发生变化。 警告:当在遥操作时不可避免地接近 OpenArmX,应与肘部、肩膀及末端执行器突出部位保持安全距离,避免手指被卡住。
3. 🥽 佩戴适当的防护装备(PPE)¶

操作 OpenArmX 时务必佩戴安全护目镜。
必备防护装备:
- 👓 安全护目镜(必须佩戴)
- 👷 安全帽(建议佩戴)
- 🧤 防护手套(必要时佩戴)
- 👞 安全鞋(建议佩戴)
- 👔 合身工作服(避免宽松衣物)
当你需要远程操作机器人或其他目的时,穿合身的衣服,避免被卷入身体。
4. ⚖️ 在规定的限制范围内操作¶
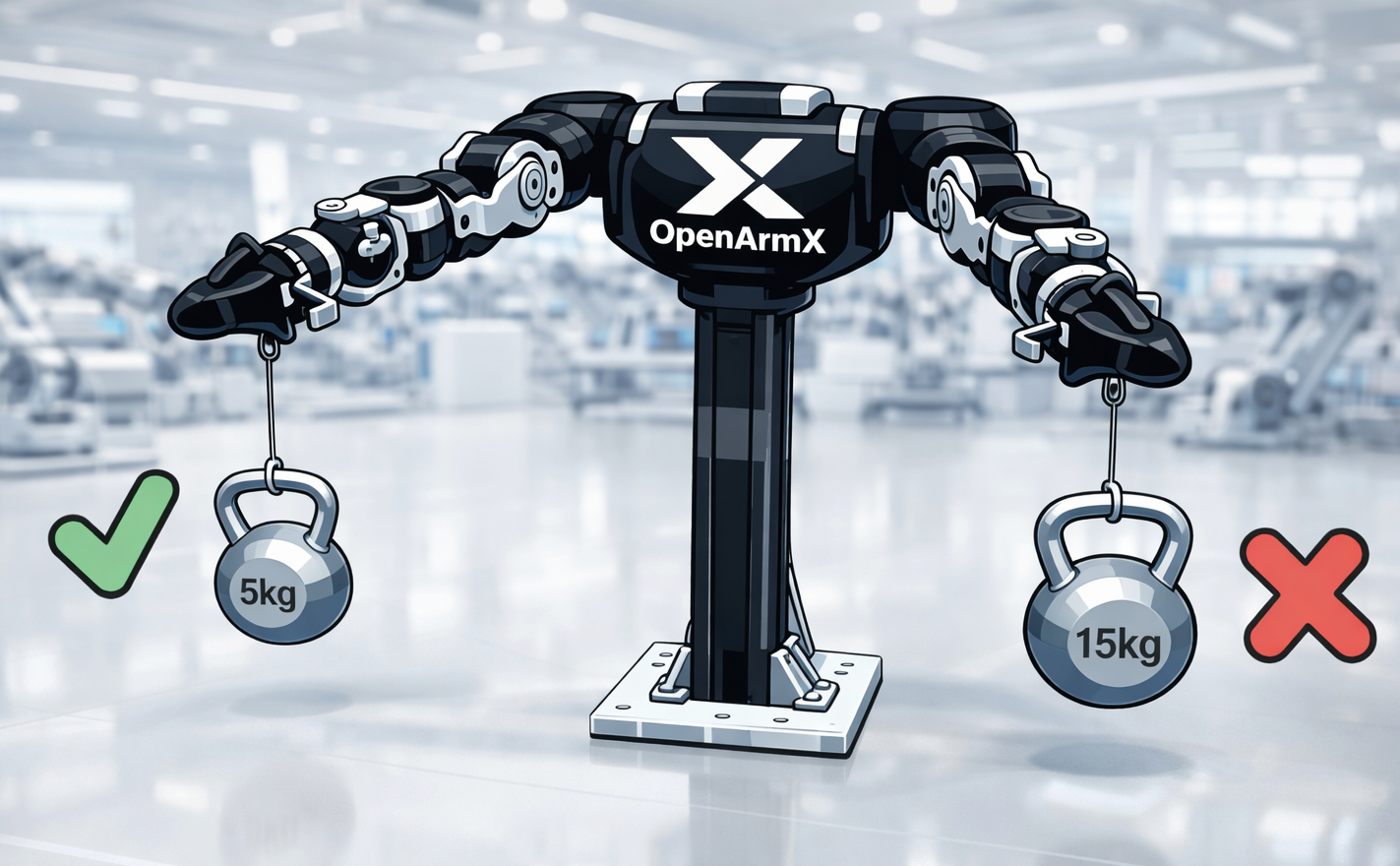
切勿在单臂或双臂的指定有效载荷限制之外操作 OpenArmX。
负载限制:
- 📦 MIT 模式下单臂最大负载:5kg,CSP 模式下单臂最大负载:2kg。
- 🤝 MIT 双臂协作最大负载:8kg,MIT 双臂协作最大负载:5kg。
- 🔧 使用末端执行器时需计入其重量
- ⚠️ 超载可能导致设备损坏或安全事故
5. 🛑 准备紧急停止¶

熟悉紧急停止装置的位置和操作方式,以便在发生异常时立即启动。
紧急停止要求:
- 📍 已配备了机械自锁式硬件急停按钮,请将其置于明显、易于触及的位置
- 🏃 参与人员要距离 OpenArmX 足够远的安全位置
- 🔄 定期测试急停功能是否正常
警告:
- OpenArmX 具有高度的后驱性能,适合双侧控制。
- 请注意,如果因紧急停车而断电,所持负载会迅速下降。请确保 OpenArmX 下方无人
6. 📊 评估风险并持续改进¶
记录并定期审查使用过程中发现的任何危险或改进点。
持续改进流程:
- 🔍 识别风险 - 发现潜在危险
- 📋 评估分析 - 分析严重程度
- 📝 制定措施 - 制定改进方案
- ✅ 实施改进 - 执行改进措施
- 📖 记录审查 - 记录并定期审查
- 🔄 监控反馈 - 持续监控效果
提示:安全必须通过所有用户的合作不断提升——不能只保证一次。通过加入社区,你可以参与关于提升安全性的讨论。
🔧 安全维护与检查¶
为了确保 OpenArmX 安全运行,每日检查和维护至关重要。特别注意以下几点,以便在早期发现任何异常或磨损。
🔩 底座紧固件和螺丝松动¶
风险描述:
某些姿势或震动的反复动作可能导致螺丝或夹具意外松动。底座或臂关节周围的螺丝松动可能导致严重事故。
检查要点:
- ✓ 每次操作前检查底座固定螺丝
- ✓ 检查臂关节周围的螺丝
- ✓ 发现松动立即拧紧
- ✓ 定期使用扭矩扳手检查紧固力
⚙️ 机械极限的损伤¶
风险描述:
每个关节都配备了机械限制,以防止异常姿势并保护连接线。这些机械极限可能会因强烈冲击而变形或被破坏。
检查要点:
- ✓ 定期检查机械限位装置
- ✓ 观察是否有变形或裂纹
- ✓ 测试限位功能是否正常
- ✓ 发现损坏立即更换
🔊 异常声音或关节卡住¶
风险描述:
过度负载或操作过程中的撞击可能导致异常噪音或关节卡住。这通常是由于机加或板金件变形、电机齿轮箱损坏或电缆被卡住所致。
检查要点:
- ✓ 运行时注意听是否有异常声音
- ✓ 检查关节运动是否顺畅
- ✓ 确定噪音或卡住的具体位置
- ✓ 彻底调查原因并及时处理
🔌 线路和连接器损坏¶
风险描述:
反复的急弯或连接不当断开会损坏线路和连接器。如果电缆或连接器受损,OpenArmX 可能无法正常工作,可能导致电源或控制设备损坏等电气问题。
检查要点:
- ✓ 检查电缆是否有磨损或破损
- ✓ 检查连接器是否松动或变形
- ✓ 检查从底座到端部的完整线路
- ✓ 发现异常立即断电并更换损坏部件
通过继续安装、调试和使用本产品,即视为用户已阅读、理解并接受本安全声明的全部内容,并承诺在实际操作中切实执行上述安全措施。如对任何安全条款或使用方式存在疑问,请在使用前联系技术支持进行确认。