🚀 快速开始指南¶
本指南将帮助您完成 OpenArmX 双臂机器人的基础配置和第一次运行。
⚠️ 开始前必读
请在操作 OpenArmX 前仔细阅读本指南,并安全使用,风险自负。
- 请先阅读 安全声明 章节
- 确保已配备硬件急停按钮
- 首次使用建议在专业人员指导下进行
- 如不满足以上要求,请勿使用本产品
📞 操作过程中如遇问题,请联系 技术支持 获取帮助。
📦 用户自备¶
开箱前请先备齐以下物品。
| 序号 | 物品 | 图片 | 说明 |
|---|---|---|---|
| 1 | G型夹 |  |
至少2个,用于固定机械臂到桌面 |
| 2 | 显示器 |  |
用于调试和可视化 |
| 3 | HDMI 线 |  |
连接主控计算机和显示器 |
| 4 | 键盘鼠标 |  |
操作主控计算机 |
🎯 开箱自检指南¶
带领您安全、系统地完成开箱到基础功能验证的全过程,确认机器人可正常投入开发。
⚠️ 安全准备与开箱¶
原则:先检查,后通电;先静后动,步步确认。
- 环境:干净、干燥、平整、稳固的桌面
- 搬运:托住机器人主体结构搬运,切勿抓握线缆或单个关节
- 电源:在此阶段结束前,切勿连接电源
📝 清点配件与目视检查¶
请对照下表,取出物品并逐一检查。
| 序号 | 物品名称 | 图片 | 数量 | 检查要点 |
|---|---|---|---|---|
| 1 | 包装箱 |  |
1个 | 外包装无破损、受潮或挤压变形 |
| 2 | 机械臂主体 |  |
1台 | 整体无变形、裂纹、深划痕 |
| 3 | 48V 电源适配器 |  |
1个 | 标签电压正确,线缆无破损 |
| 4 | PCAN-USB 适配器 | 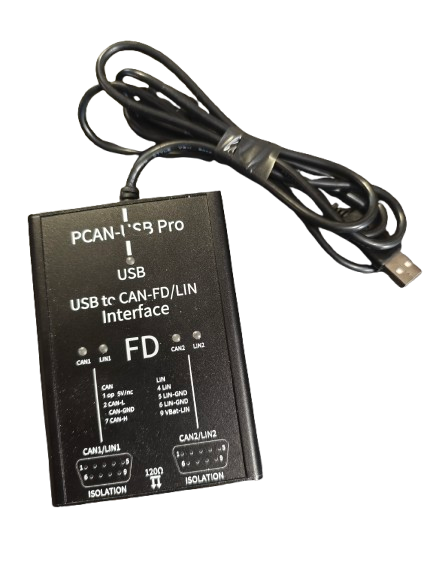 |
1个 | USB接口金属片无弯曲、锈蚀 |
| 5 | CAN 通信线缆 | 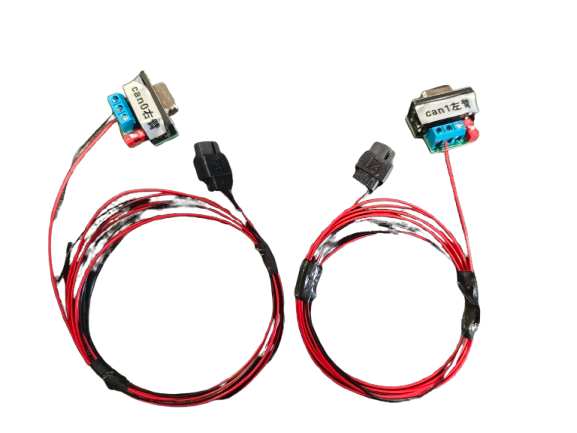 |
2根 | 已安装在机器人机身上!! ⚠️ 拆时小心,线缆易缠绕;两端接口卡扣完好,线身无挤压 |
| 6 | 电源线 |  |
1根 | 已安装在机器人机身上!! 请查看插头有无烧蚀,线皮有无破损 |
📦 开箱¶
硬件连接¶
ℹ️ 发现问题?立刻停下,不要通电。拍摄问题部位、外包装箱、序列号标签照片,保持原状,并联系 技术支持。
⚡ 第二步:电机测试¶
此步骤是为了验证机器人关节是否正常
🎯 第三步:启动 MoveIt¶
此步骤用于验证 ROS 2 + MoveIt 的基础运动规划链路是否可用,包括:
- 机器人模型(URDF / SRDF)是否正确
- 规划器是否能够生成一条可执行的关节轨迹
- 规划结果是否能够正确下发并驱动机器人运动
注意:
使用 MoveIt 控制机器人运动时,出现轻微抖动属于正常现象。
这是因为 MoveIt 本身并非底层实时控制器,而是:
- 将规划好的轨迹离散成多个时间段点
- 以固定频率发送给机器人控制器执行
如果 速度 / 加速度 / jerk 参数匹配不佳,机器人在运动过程中会频繁经历加速与减速阶段,从而表现为抖动或非平滑运动。
可缓解方式包括:
- 适当降低 MoveIt 中的速度和加速度限制
- 调整机器人控制器的 PID 参数,提高系统刚性
需要注意的是:
本步骤仅验证“基础运动规划是否可用”,
并不代表运动规划质量、动态性能或工程级平滑性已经达到最优。
如对运动平滑性或工业级轨迹质量有更高要求,可考虑使用其他专用轨迹规划或时间参数化方案(例如基于时间最优或工业控制器的规划方式)。
或者使用我们的机器人关节运动控制插件控制机器人运动!
✅ 验证清单¶
完成以下检查,确认系统正常运行:
| 检查项 | 仿真 | 真机 | 说明 |
|---|---|---|---|
| CAN 接口状态 | - | ✓ | 单臂: can0/can1,双臂: can0~can3 均为 UP |
| 电机使能 | - | ✓ | 无报错信息 |
| 电机测试 | - | ✓ | 电机平滑转动 |
| RViz 显示 | ✓ | ✓ | 正常显示机器人模型 |
| 运动规划 | ✓ | ✓ | 按规划路径运动 |
| 急停按钮 | - | ✓ | 按下后电机立即断电 |
🎉 恭喜!¶
您已完成 OpenArmX 机器人的基础功能验证,可以开始探索更多功能了!
技术支持¶
这里放技术支持的信息,比如微信二维码!