Specifications
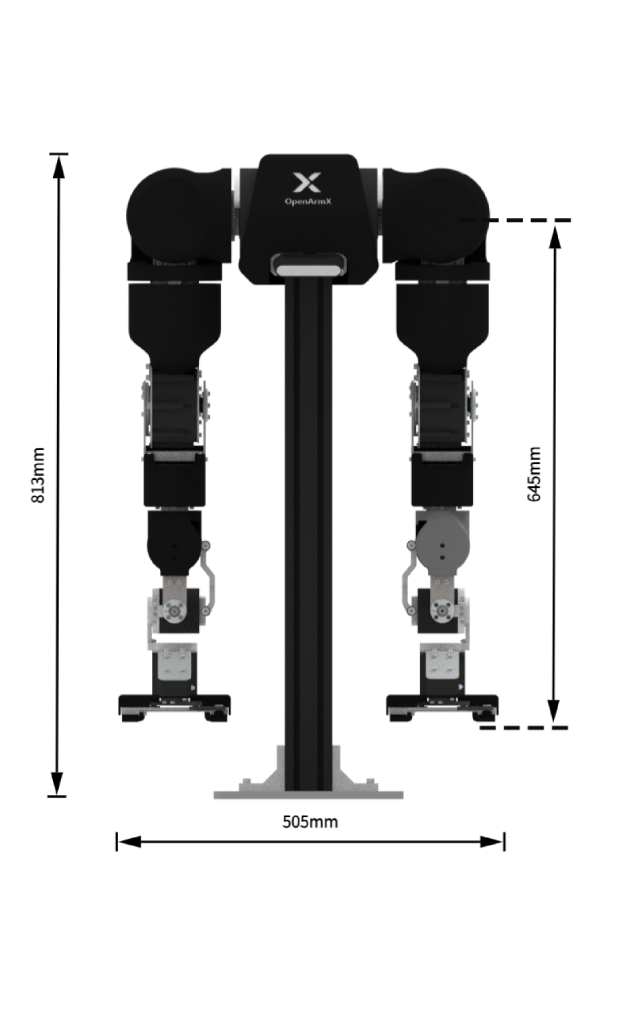
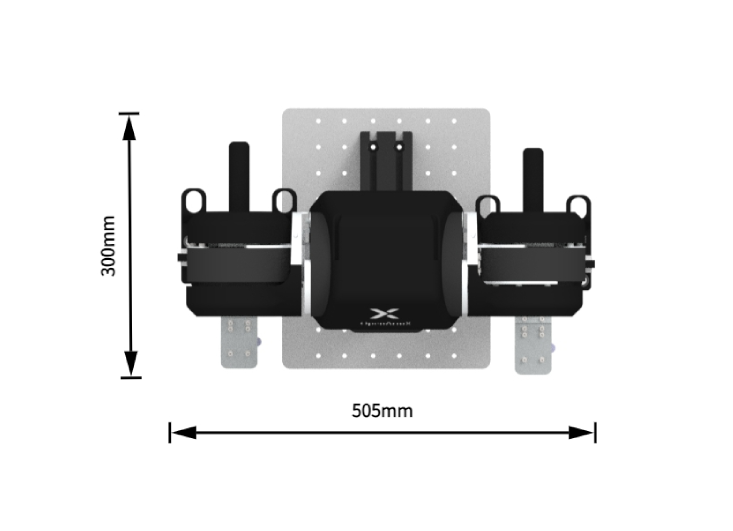
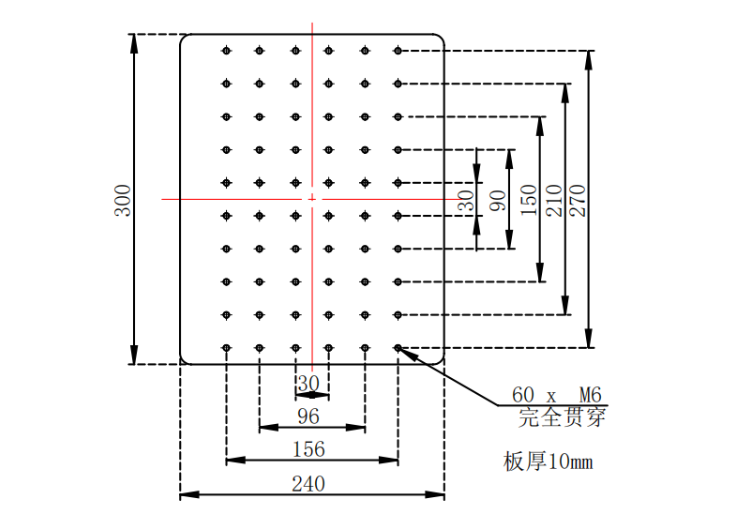
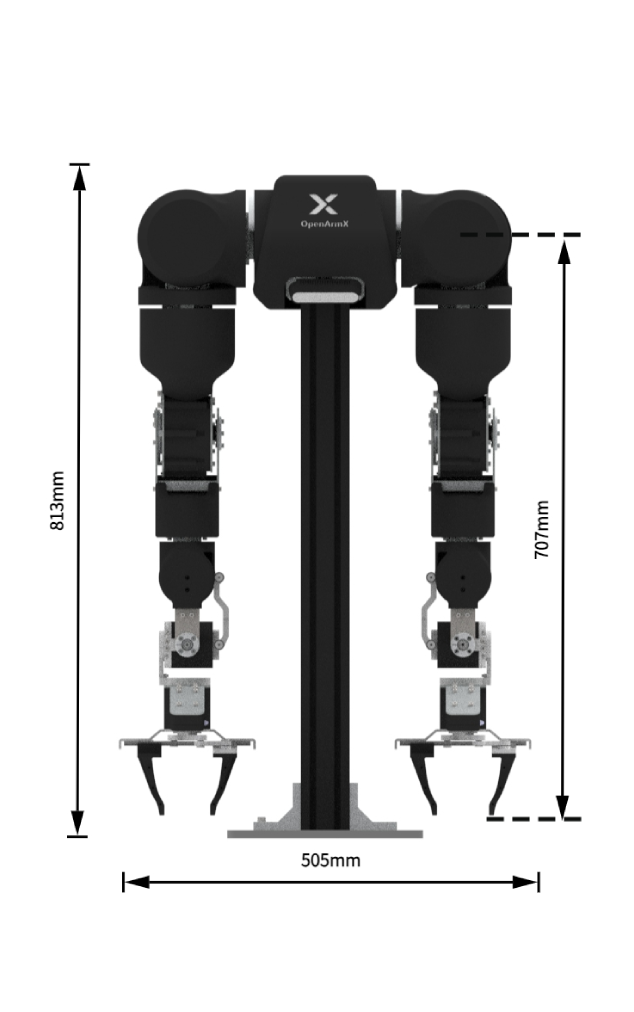
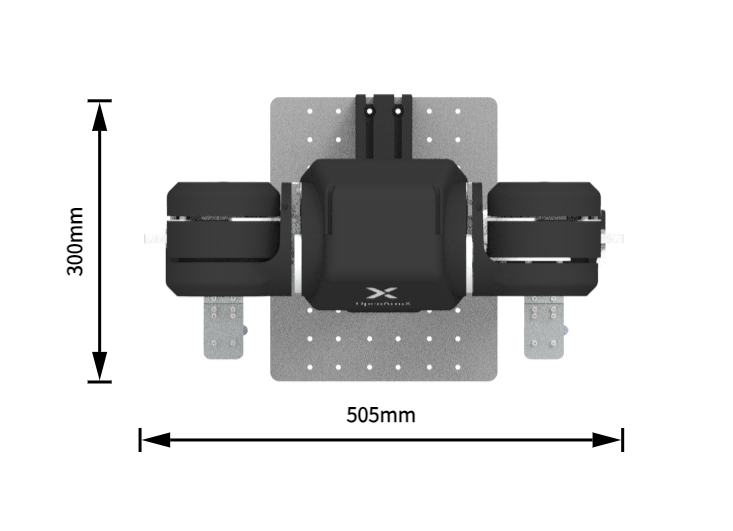
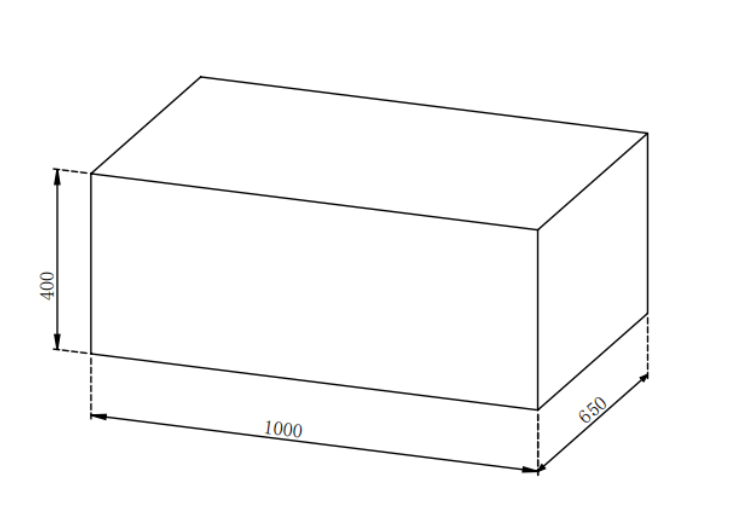
Mechanical Parameters¶
What is OpenArmX-Pro-Max?¶
OpenArmX-Pro-Max is an open-source bimanual collaborative robot development platform developed by Chengdu Changshu Robotics Co., Ltd. Based on high-performance Robstride quasi-direct-drive motors and ROS2 Humble architecture, it provides a complete hardware and software solution.
Core features:
- 🤖 Bimanual design: left and right 7-DoF arms
- ⚡ High-performance motors: Robstride RS series quasi-direct-drive motors
- 🔓 Fully open-source: open hardware design and software code
- 🎯 Developer friendly: built on ROS2 ecosystem with MoveIt support
- 🔧 Highly customizable: supports parameter tuning and secondary development
Arm Specifications¶
| Parameter | Specification |
|---|---|
| Number of arms | 2 (left arm, right arm) |
| DoF per arm | 7 DOF (excluding gripper) |
| Total DoF | 14 DOF (excluding gripper) |
| Reach | Approx. 800 mm (per arm) |
| Payload | Approx. 5 kg |
Follower¶

Leader¶