Motors
Motor Configuration¶
OpenArmX uses Robstride series quasi-direct-drive motors:
Motor model distribution:
| Joint Position | Motor Model | Quantity | Characteristics |
|---|---|---|---|
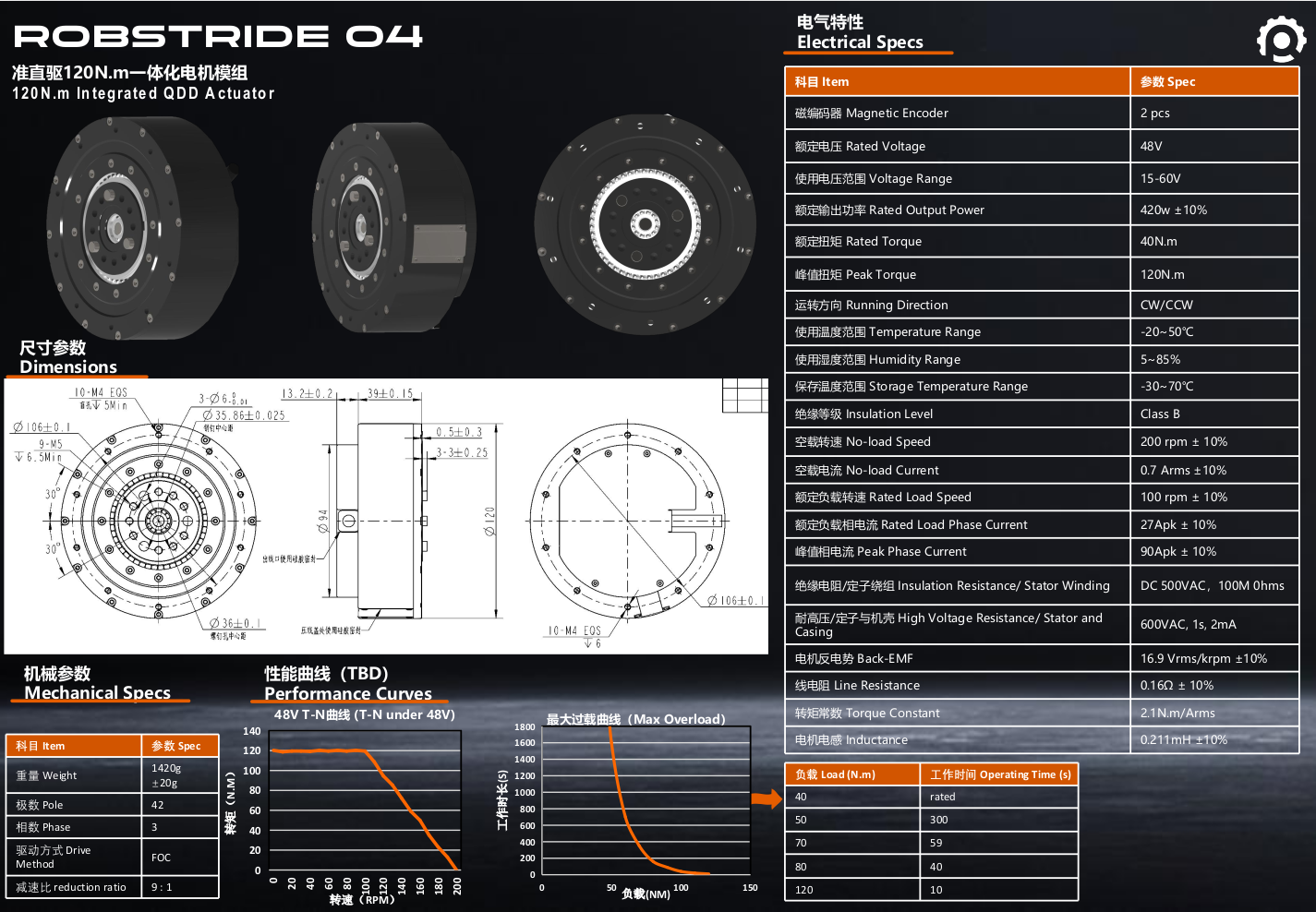
| Shoulder (1-2) | RS04 | 4 (2 per arm) | High torque, suitable for shoulder load |
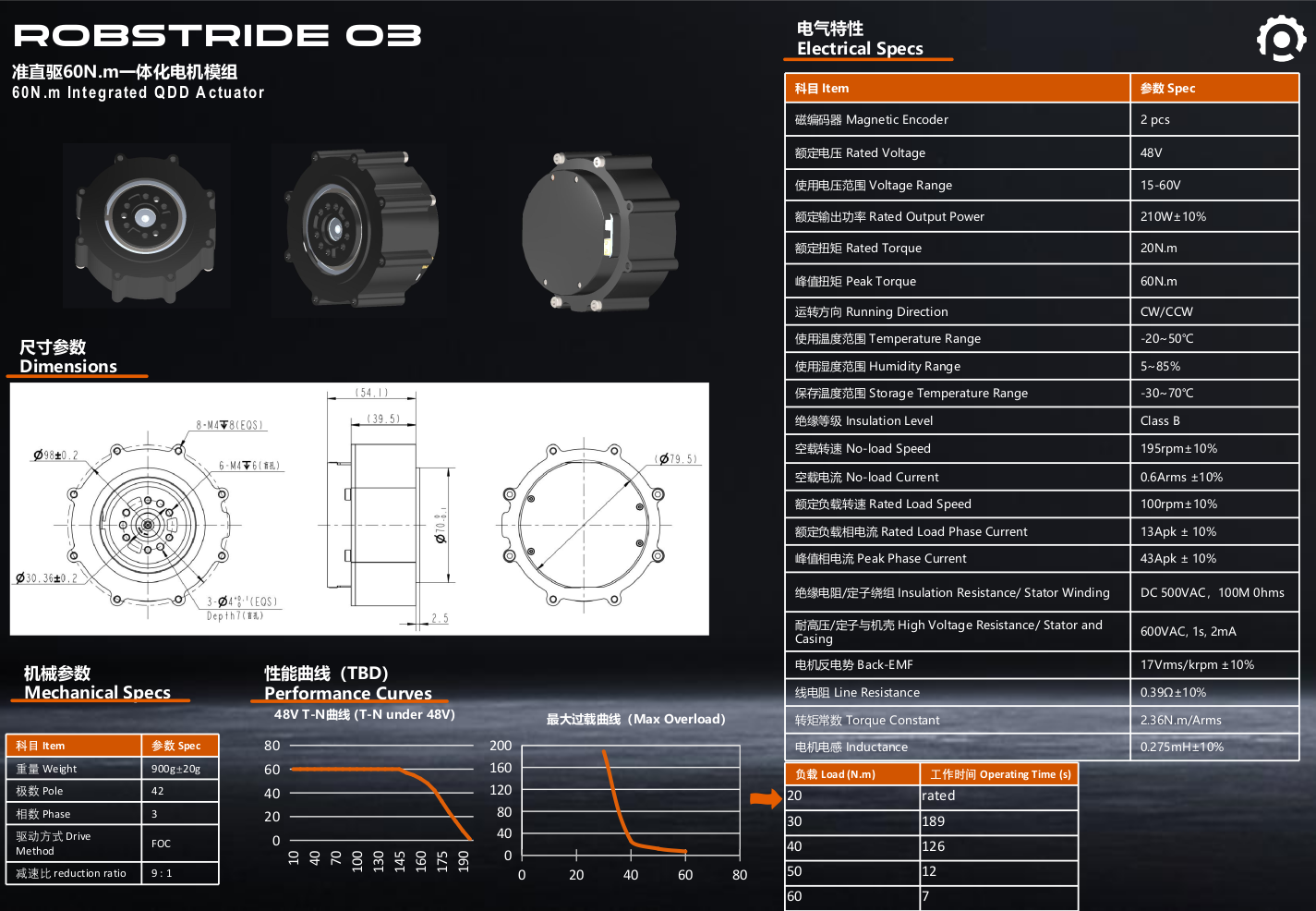
| Upper arm (3-4) | RS03 | 4 (2 per arm) | Compact design, flexible motion |
| Forearm to gripper (5-8) | RS00 | 8 (4 per arm) | Small, high-precision motors |
Key motor parameters:
| Model | Power | Rated Torque | Peak Torque | Max Speed | Interface |
|---|---|---|---|---|---|
| RS04 | 700W | 40Nm | 120Nm | 15rad/s | CAN 2.0 |
| RS03 | 380W | 20Nm | 60Nm | 20rad/s | CAN 2.0 |
| RS00 | 140W | 5Nm | 14Nm | 33rad/s | CAN 2.0 |