规格
机械参数¶
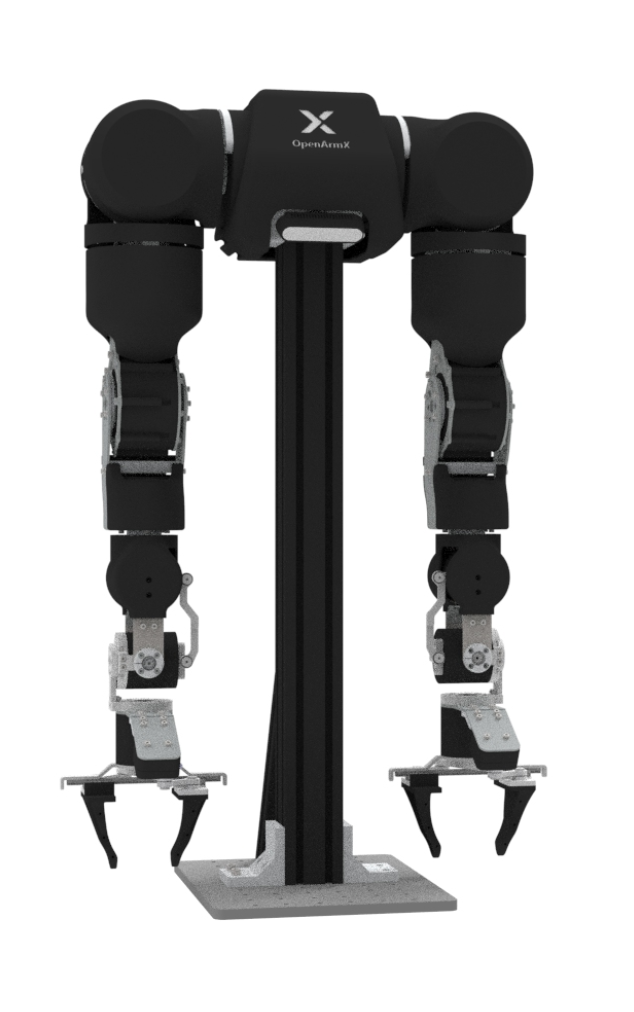
什么是 OpenArmX-Pro-Max¶
OpenArmX-Pro-Max 是一款开源的双臂协作机器人开发平台,由成都长数机器人有限公司研发。它基于高性能的 Robstride 准直驱电机,采用 ROS2 Humble 架构,提供完整的硬件和软件解决方案。
核心特点:
- 🤖 双臂设计: 配备左右两条7自由度机械臂
- ⚡ 高性能电机: 采用 Robstride RS系列准直驱电机
- 🔓 完全开源: 硬件设计、软件代码完全开放
- 🎯 易于开发: 基于ROS2生态,支持MoveIt运动规划
- 🔧 高度可定制: 支持参数调整、二次开发
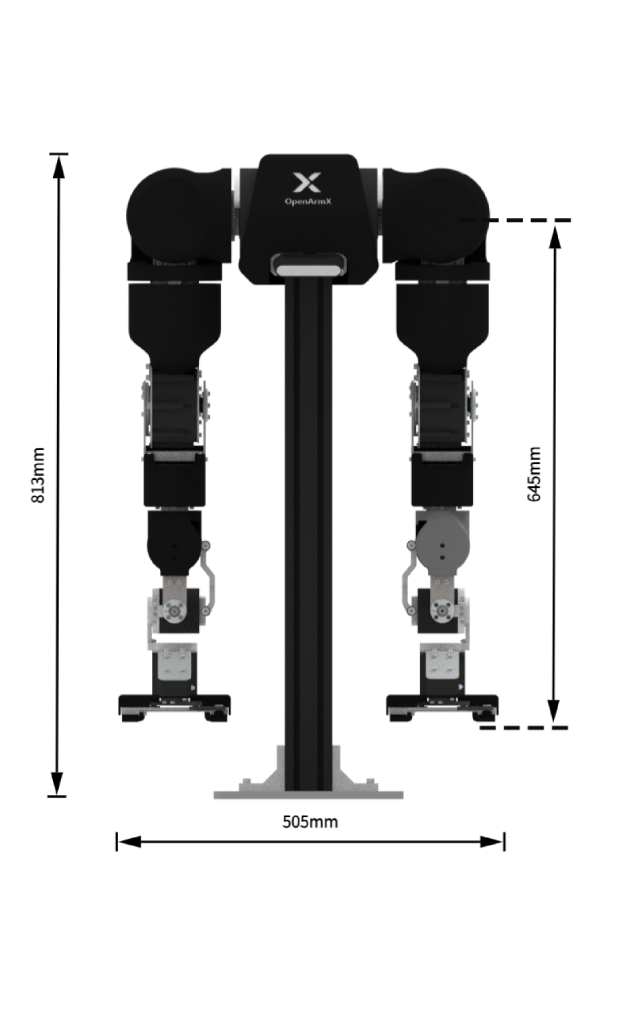
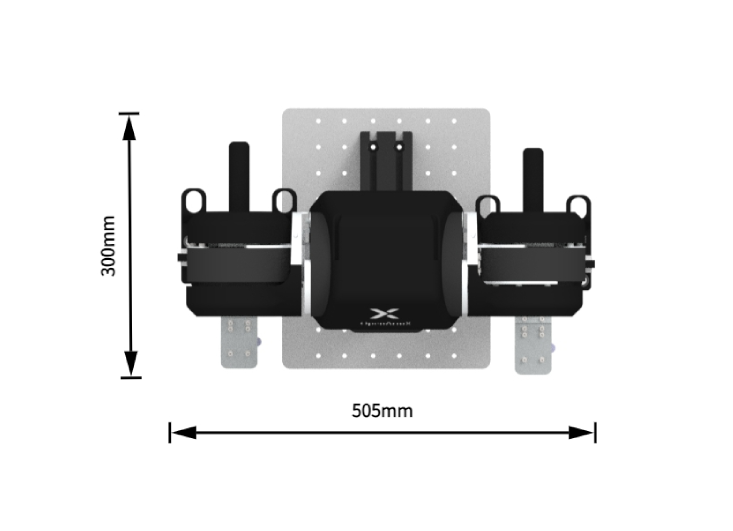
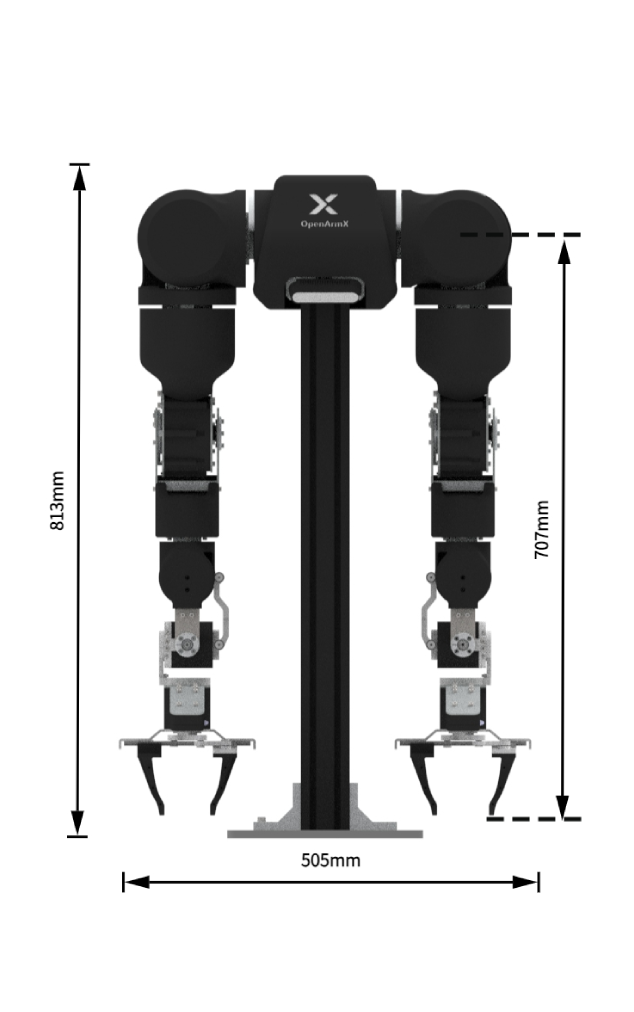
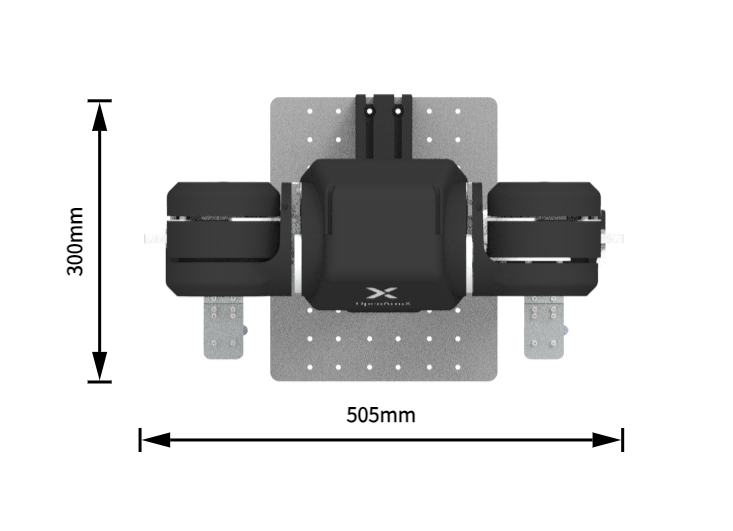
机械臂规格¶
| 参数 | 规格 |
|---|---|
| 臂数量 | 2条(左臂、右臂) |
| 单臂自由度 | 7 DOF(不含夹爪) |
| 总自由度 | 14 DOF(不含夹爪) |
| 臂展 | 约 800mm(单臂) |
| 有效载荷 | 约 5kg |
从动端¶

主动端¶