VLA 环境配置¶
🎯 目标:完成 LeRobot + OpenArmX 本地环境安装,为后续数据采集、训练和推理做准备。
📝 使用约定¶
本地终端:ROS2 工作空间终端lerobot 环境终端:已激活lerobotconda 环境
占位符说明(按实际替换):
你的数据名称,例如openarmx_dataset你的任务名称,例如Teleop OpenArmX robot你的数据绝对路径,例如~/.cache/huggingface/lerobot/local/openarmx_dataset训练好的模型名字,例如act_openarmx_exp1
1. 安装 Anaconda 与 Python 环境¶
1.1 安装 Anaconda¶
cd ~
wget https://repo.anaconda.com/archive/Anaconda3-2023.03-1-Linux-x86_64.sh
bash Anaconda3-2023.03-1-Linux-x86_64.sh
source ~/.bashrc
安装脚本建议:
- 协议页:回车翻页
- 接受协议:输入
yes - 安装路径:默认
~/anaconda3 - 初始化 conda:输入
yes
1.2 关闭 base 自动激活并设置快捷命令¶
conda deactivate
conda config --set auto_activate_base false
conda deactivate
sed -i '/# >>> conda initialize >>>/,/# <<< conda initialize <<</ s/^/#/' ~/.bashrc
echo '' >> ~/.bashrc
echo '# Anaconda 快捷命令(手动激活)' >> ~/.bashrc
echo "alias conda-init='source ~/anaconda3/bin/activate'" >> ~/.bashrc
echo "alias lerobot-env='source ~/anaconda3/bin/activate lerobot'" >> ~/.bashrc
source ~/.bashrc
1.3 创建环境¶
conda-init
conda create -n lerobot python=3.10 -y
conda deactivate
2. 安装 LeRobot 与依赖¶
2.1 系统依赖 + RealSense¶
sudo apt update
sudo apt install -y \
python3-dev build-essential git git-lfs \
ffmpeg libavcodec-dev libavformat-dev libavutil-dev \
libjpeg-dev libpng-dev libgl1-mesa-glx libglib2.0-0 \
libsm6 libxext6 libsndfile1 libsvtav1-dev
sudo mkdir -p /etc/apt/keyrings
curl -sSf https://librealsense.intel.com/Debian/librealsense.pgp | sudo tee /etc/apt/keyrings/librealsense.pgp > /dev/null
echo "deb [signed-by=/etc/apt/keyrings/librealsense.pgp] https://librealsense.intel.com/Debian/apt-repo $(lsb_release -cs) main" | sudo tee /etc/apt/sources.list.d/librealsense.list
sudo apt install -y librealsense2-dkms librealsense2-utils librealsense2-dev
sudo apt install -y ros-humble-realsense2-camera
2.2 Python 依赖¶
# 激活lerobot虚拟环境
lerobot-env
# 安装依赖
pip install pyrealsense2 -i https://pypi.tuna.tsinghua.edu.cn/simple/
pip install "scipy>=1.10.1,<1.15" -i https://pypi.tuna.tsinghua.edu.cn/simple/
pip install torch torchvision torchaudio -i https://pypi.tuna.tsinghua.edu.cn/simple/
pip install 'numpy>=1.21,<2.0' -i https://mirrors.aliyun.com/pypi/simple/
pip install 'setuptools>=71.0.0,<80.0.0' -i https://mirrors.aliyun.com/pypi/simple/
pip install pillow imageio matplotlib pyyaml -i https://mirrors.aliyun.com/pypi/simple/
2.3 安装 LeRobot(三选一)¶
方法 A(推荐,pip):
lerobot-env
pip install lerobot -i https://mirrors.aliyun.com/pypi/simple/
方法 B(源码开发模式):
cd ~
git clone https://github.com/huggingface/lerobot.git
lerobot-env
cd ~/lerobot
pip install -e . -i https://pypi.tuna.tsinghua.edu.cn/simple --ignore-installed sympy
方法 C(ZIP 本地安装):
cd ~
unzip lerobot-0.4.3.zip
lerobot-env
cd ~/lerobot-0.4.3
pip install -e . -i https://pypi.tuna.tsinghua.edu.cn/simple --ignore-installed sympy
验证安装是否成功
python -c "import lerobot; print(lerobot.__version__)"
0.4.3。
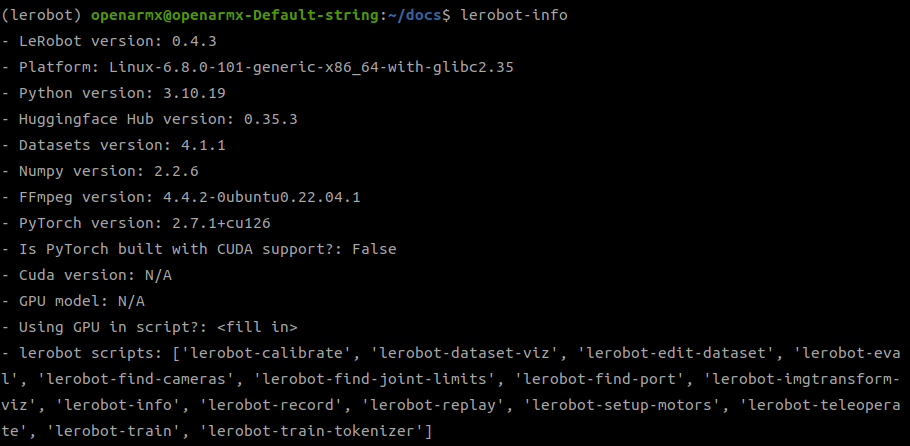
官方验证方法
lerobot-info
输出:
2.4 安装 OpenArmX 本地插件包¶
lerobot-env
cd ~/openarmx_ws/src/lerobot_vla/lerobot_robot_openarmx_follower_ros2/
pip install -e . --no-deps
cd ~/openarmx_ws/src/lerobot_vla/lerobot_teleoperator_openarmx_leader_ros2
pip install -e . --no-deps
3. 版本与冲突说明¶
⚠️
Pi0/Pi0.5与SmolVLA/XVLA在transformers版本上存在冲突,建议拆分不同 conda 环境。
- 常用 LeRobot 版本:
0.4.3 - XVLA:建议固定在 LeRobot
0.4.3使用
✅ 快速检查清单¶
conda未自动进入baselerobot-env可正常激活- RealSense 设备可识别
- OpenArmX 两个本地插件已安装
- 计划训练的模型与当前依赖不冲突